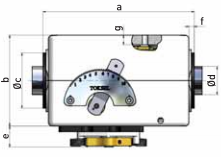
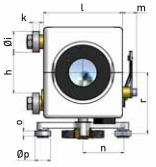
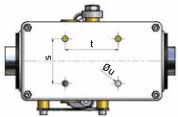
| نماذج | a | b | Øc | Ød | e | f | g | h | Øi | k | l | m | n | o | Øp | r | s | t | Øu | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
VGØ50 | 269 | 162 | 98 | 50 | 36 | 9 | 17 | 72 | 37 | 12 | 140 | 25 | 65 | 8 | 28 | 101 | 80 | 95 | M12 |
 |
VGØ30 | 171 | 114 | 62 | 30 | 33 | 9 | 14.5 | 41 | 26 | 8 | 98 | 21 | 46 | 8 | 26 | 80 | 49 | 80 | M8 |
 |
VGØ20 | 142 | 90 | 44 | 20 | 23 | 3 | 12 | 31 | 22 | 7 | 72.5 | 19 | 36 | 7 | 22 | 65 | 39 | 69.5 | M6 |
 |
VGØ15 | 99 | 67 | 32 | 15 | 20 | 4 | 7 | 25 | 16 | 5 | 53 | 17 | 26 | 6 | 19 | 51 | 38 | 36 | M5 |
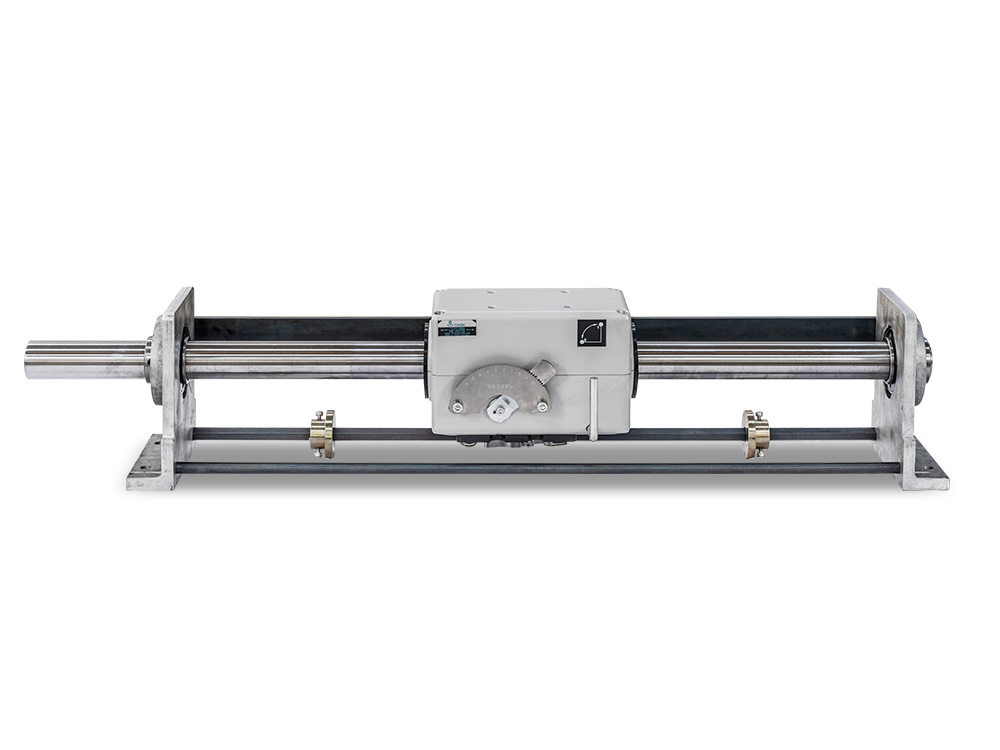
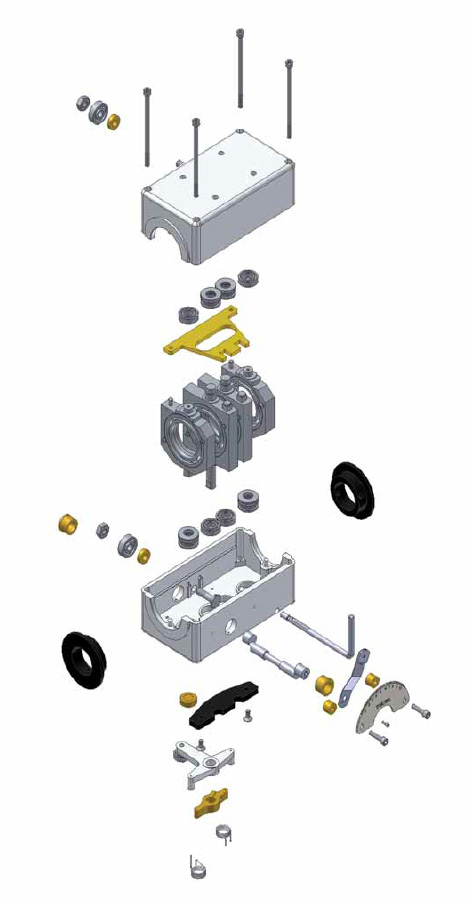
يحول حركة دوران العمود الذي يعمل بحركة مستقيمة. يستمد قوته من حركة العمود الدورانية. يوفر الحركة الخطية بالضغط على الزوايا الزاويّة بمحامل خاص مميكن مثل خيط الجوز على العمود. يعود الفضل للأنظمة الميكانيكية التي تغير مكان الرومان على الوحدة بحيث تتحرك باتجاه اليمين واليسار.
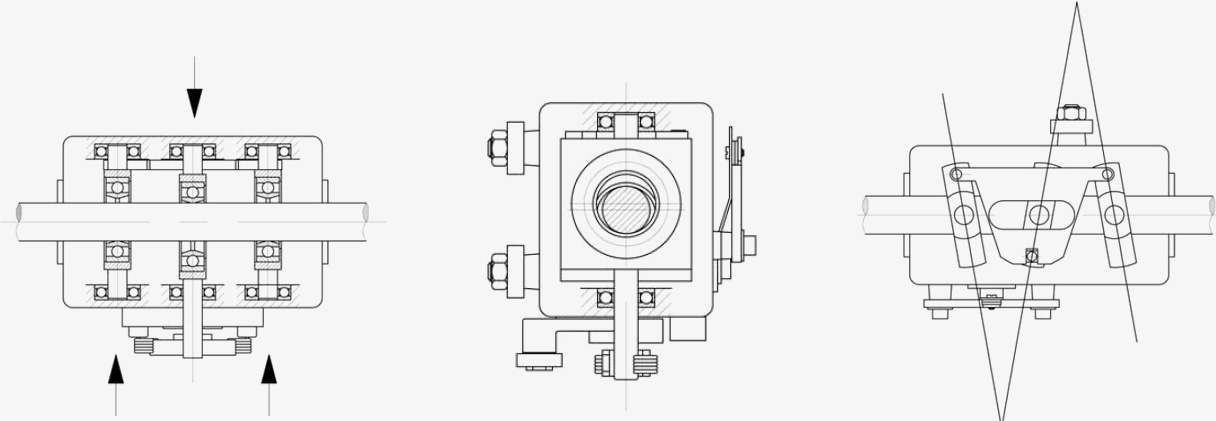
يمكن تعديل السرعة من خلال تغيير أرقام زاوية الرومان مع المقياس القابل للتعديل أمام الوحدة..
 AR
AR TR
TR EN
EN RU
RU ES
ES FA
FA